I recently finished reading "Outliers" by Malcolm Gladwell. A very interesting book.
As a parent of a two year old boy, the book really grabbed my attention; if you're a parent of a child (or possibly considering having a child), this book will amaze you. I probably can't do the overall theme justice, but I'll try - the book basically asserts that much of our success (or failures) in life are not necessarily linked to just IQ but in our overall environment and the roadblocks or opportunities that life throws at us.
It's a huge concept to get your arms around. As I read the book, I remembered back to my freshman year of high school - I was one of 12 kids in a class size of 320+ that had a home computer - my dad purchased the brand new Apple Mac - yes, the VERY first model - and I was hooked. It's not that having the computer influenced my studies or what subjects I chose to study later in life, but just having that computer was a major positive influence in ways I probably can't even number.
Let's jump to today's world and talk about the NXT kit for a moment. This is cutting edge stuff. For under $300US, a child, a family, and even a class (or school) can have some of the very latest in robotics technology readily available. Whether a child "gets it" is not the question here - it's the access. Does your child have access to this technology?
We take for granted, I'm sure, that every child has access to a computer, but that's completely untrue. Some schools may have 2 or 3 computers for the entire school - how much actual hands-on time do we truly expect children at that school to get at the keyboard? Probably not much. And I'm fairly certain that not every kid in the USA (let alone other countries) has access to the NXT kit. I'm continually amazed at the parents and kids who tell me they just learned about MINDSTORMS - and this is a kit that's been around since 1998! Over 10 years and many parents and teachers are still unaware that this level of technology can be purchased at the local toy store and even at Amazon.com.
"Outliers" was an eye-opener for me - it made me realize how many opportunities I had in my early years that influenced my education, my hobbies, my skills, and my career. And it made me realize just how easy it is to stifle a child's success in school and life. I'm not speaking lightly here, either - after reading the book, I found myself very upset and down as I thought about all the kids out there in school who may hold the cure to cancer in their heads or the next breakthroughs in energy technology but, for lack of opportunity, may find themselves discouraged or even completely cut-off from reaching their true potential.
The book has some adult language, here and there, but nothing super offensive - it's mainly found in some interviews with key individuals who have found success or failure in life and can explain how they got where they are. Entertaining stories of the succcesses of Bill Gates, Steve Jobs, and others are better understood once you get a background of their childhood and see what opportunities they had - not much was denied these guys, as you'll read about if you pick up a copy of the book.
Now, not everyone agrees with all the assertions made in the book, and I'm doing some of my own digging to verify some things covered by the author, but it's definitely worth a look if you've got the time. For those of us adults (teachers, parents, and AFOLs) who look at the NXT as a hobby and a fun experience, this book may very well open your eyes to a new idea: Just as there were certain periods in time of explosive growth in the economy and technology areas, there were also those who encountered just the right mix of chance and luck and opportunitites and were able to do some incredible things. The NXT, a toy it may be, is opening the eyes of kids everywhere to learn and try new things. It's encouraging math and science but it's also encouraging non-measurable things such as self-confidence, an acceptance that it's okay to fail sometimes when a lesson is learned, and discovering that there's almost always a solution if you look hard enough, study, dig deep, and experiment.
I realize this post is a bit "out there" but unless you've read "Outliers" it's a bit hard to explain just how much of an impact that book may have on a parent or teacher who has the ability to influence one or more children. Teachers are probably already aware of many of the concepts in this book, but not all of us are teachers. Some of us are just coming around to understanding that when we limit the opportunities given to our kids, we're limiting the opportunities they'll have later in life.
There's no real answer and I'm not asking for one - do we put an NXT in every classroom? That's not feasible and even so, it's not the best solution. Programs such as the OLPC (One Laptop Per Child) are just starting to scratch the surface of changes that need to be made, here and abroad. I wonder what kind of impact ONPC (One NXT Per Child) might have if it were even remotely possible...
Tuesday, March 31, 2009
Friday, March 27, 2009
NXT Bike
Last month I blogged about the new Black NXT that LEGO just launched in USA and Canada. If you are lucky enough to live in North America, you can still order them - there are still a few left from the Limited Edition run of 1998 units.
I got mine recently - and I decided to build the Bike from the One Kit Wonders book:

I used black pieces instead of the white and grey pieces that comes with the standard NXT kit. The black bike looked stunning. I thought it will be cool to have the Black bike and the white bike running at the same time. More to follow:
The NXT bike can be built with pieces from a single NXT (Retail) kit.

Building instructions for the bike can be found on last chapter of the LEGO MINDSTORMS One Kit Wonders book that was published a few months ago..
The book also has 9 other really cool models - some of them written by contributors to this blog including Jim, Chris, Matthias, Martyn, Jonathon, Eric, Laurens, and myself. You can get the book from here.
If you want a preview of the Bike building instructions, check out this link.
Back to the Black bike: Here is a video of a Black NXT bike and a white NXT bike riding autonomously and avoiding each other. To make it more interesting, I decided to shoot the video inside the pool - albeit on the pool cover - which meant the only think separating the precious NXT models and the water was a 1 mm thick bubble wrap floating on the water!
During the filming, the inevitable happens - you can see one of the two bikes getting wet at the end of the video!
Edit: I first posted this early in the week - but took it off immediately as it had an HTML error - which is now fixed.
Thursday, March 26, 2009
Classic Arcade Games: NXT Style
Want a NXT-it-yourself way to play classic arcade games?
Sorosy Dot Com has developed classics for the NXT including:
Asteroids




and Pong
Happy gaming!

Arkanoid

HeadOn

Lunar Lander

and Pong

Start by building your own Arcade Game Machine, shown below. The downloadable instructions are here.


Then download the NXT Arcade Game Manager here. How to use the NXT Arcade Game Manager to upload the games and instructions for games are here.
Happy gaming!
Wednesday, March 25, 2009
Datalogging for the Busy Teacher - review
 Damien Kee from Domabotics.com has written a new booklet on datalogging with the NXT. I recently got a chance to read through it, and my first impression is that it was well-named. Titled "Datalogging Activities for the Busy Teacher", it is structured as a series of almost stand-alone short projects or lessons, ideal for teachers with little time and little or no background with the NXT.
Damien Kee from Domabotics.com has written a new booklet on datalogging with the NXT. I recently got a chance to read through it, and my first impression is that it was well-named. Titled "Datalogging Activities for the Busy Teacher", it is structured as a series of almost stand-alone short projects or lessons, ideal for teachers with little time and little or no background with the NXT.The book starts with a few pages talking about what datalogging is & how it works, and then just a very brief review of the built-in datalogging environment of Educational version of NXT-G 2.0. At the end of the book are a series of handouts and worksheets for the students, saving the teacher the time of developing these themselves. But the bulk of the book is a series of chapters organized by sensor: datalogging with the touch sensor, datalogging with the light sensor, etc, including the new temperature sensor. Each chapter starts with a description of the sensor, and what sort of readings it yields, before using it in a couple of experiments. Many of the experiments even come with a series of guided questions, including sample answers that students might generate. Chapter 8 steps up to experiments using more than one sensor, and shows some new ways to coordinate them.
On the whole, it's a nice set of simple hands-on experiments. There are some that kids will get a big kick out of (some that depend on human behavior of their fellow students), and some that teachers might value because they move towards even more sophisticated topics like physics (like building a "timing gate" with two light sensors). Some of them like, "The Bouncing Ball", are excellent examples of using datalogging to monitor something that otherwise would be very difficult to measure by other means.
There were some things I found to be a problem; for the most part they weren't due to the book, but due to the tools and the setting. Datalogging under NXT-G 2.0 is very easy, but it has some serious limitations as well - since it just logs the sensors, things like recording a series of touch sensor presses is poorly handled. For experiments like this, the students need to go over a graph of the data to manually record each push and the time they happened at. Here, using the built-in environment ends up making more work for the students, not less. The datalogging environment doesn't log as fast as it could (useful for some things, like the "bounce" experiment), and there's no real discussion of the memory limitations (why you don't want to log every 2 seconds for a week). In short, some of the experiments would be easier and make more sense if the students didn't use the new environment at all, but spent some more time understanding what they really needed to record... and how to do it.
The only other thing I had a problem with, is that the experiments seem too simple... there are a lot of other options, alternatives, or directions to take these experiments in, that I found myself asking "but what about...?" often while reading it. But that's not really a problem with a book; in some ways, it's one of the strengths of the book. Here Damien Kee has laid down the basics in a way the a teacher can adopt very easily, with very little effort - yet it opens up a world of possibilities for both the students, and the teacher, to take it much further. Here's where the real strength of this sort of workbook lays: in opening up the NXT to practical experimentation for people who haven't had the chance yet.
Teachers, you'll like this one, especially for grade-school kids and tight time budgets.
Tuesday, March 24, 2009
Guest Blog - Ed M.
Ed M. emailed about a recent project he completed with his son - this is a fun read:
My son and I just completed his science project which involved LEGO and PF motors. Our exploration was called "Can you train a chicken?"
My son and I just completed his science project which involved LEGO and PF motors. Our exploration was called "Can you train a chicken?"
To answer this we created the "chicken box" that you can see in the YouTube clip. We spent a couple of days getting the chickens to associate the beep of the box (a little piezo wired onto a PF connector) with being fed their favorite thing; string cheese.
My son would lead the chickens to the box by showing them the string cheese. At the same time he was triggering the beep and opening the box (via the PF RF remote). After that he'd put the cheese in the box and the chickens would chow down. I'd say the one unexpected design challenge was the fact that the PF motors turned so FAST! I ended up making a tiny gear box with a couple of reductions in it. This made the action slow enough as to be usable (and not threaten the chickens).
Then every morning and afternoon (before letting the chickens out of their run) we'd load the box with cheese. Peaking from a window, my son would trigger the beep and the chickens would come running to the box. He'd open the door and they'd chow down. At the end of seven days of experimenting, we aren't sure the chickens came running because of the beep or because of the sound of the PF motor (or both), but it became obvious to us that they knew the beep meant the box was going to open and provide them cheese and that was enough for us for this first experiment.
I'm contemplating another experiment that requires the chicken to tap a specific sequence of touch sensors to get food (this is similar to chicken training I've researched on the web). In that case I WILL use the NXT and let you know how it goes.
Saturday, March 21, 2009
Dual NXT Biped
Check out this huge build from 222Doc.
It has 7 degrees of freedom, and can walk up a step of 1.5 inches in height. Notice how it moves the NXT's from left to right to shift the centre of mass over the supporting foor.
--
Damien Kee
www.domabotics.com
It has 7 degrees of freedom, and can walk up a step of 1.5 inches in height. Notice how it moves the NXT's from left to right to shift the centre of mass over the supporting foor.
--
Damien Kee
www.domabotics.com
Friday, March 20, 2009
Marble Madness - Guest Blog
NXTManiac wrote in about a new NXT Project titled Marble Madness.
"It's a robotic marble machine that propels marbles around a track, using many different ways of moving the marbles up, down, and around. It was made over the course of 4 days, much of the time figuring outs different ways to make the marbles move around. The final design (many tests and prototypes) includes steps, treads, and slides."
Check it out here.
"It's a robotic marble machine that propels marbles around a track, using many different ways of moving the marbles up, down, and around. It was made over the course of 4 days, much of the time figuring outs different ways to make the marbles move around. The final design (many tests and prototypes) includes steps, treads, and slides."
Check it out here.
Wednesday, March 18, 2009
NXT Motor Grader: Part 3: NXT controlled Lighting
Continuing on with the series of posts on creating a NXT motor Grader I started last week ... Today we are going to look at lighting. This is an important part of the NXT robot design that often gets overlooked.

When I started the project I was not sure what sort of lights to use - some are easier to use with NXT. Some are so bulky it simply does not go with the model.
The next lights I tried was the PF lights that came with the new LEGO TECHNIC off roader. The lights were very elegant and fitted neatly inside the standard hole. It was perfect. However I was not sure how best to interface to NXT. First I tried connecting it directly using the adopter:


Motor graders are often used in winter to clear snow - so lighting is very important. I tried to create the large floodlight the big Cat graders have:

When I started the project I was not sure what sort of lights to use - some are easier to use with NXT. Some are so bulky it simply does not go with the model.
My first attempt used the LEGO lights that comes with the NXT Education version:
 They are easy to interface (using the cable that comes with the kit) and can be programmed using the NXT-G Motor block. However, I did not like the studded pieces so I discarded the design.
They are easy to interface (using the cable that comes with the kit) and can be programmed using the NXT-G Motor block. However, I did not like the studded pieces so I discarded the design.
The next lights I tried was the PF lights that came with the new LEGO TECHNIC off roader. The lights were very elegant and fitted neatly inside the standard hole. It was perfect. However I was not sure how best to interface to NXT. First I tried connecting it directly using the adopter:
The disadvantage of this is that I loose one NXT port - which was not acceptable.
So I used the PF power supply for the power - given that there was a PF supply already in my grader design (see last part). The IR-Link allowed the NXT to control the light and the brightness programatically:
Programming the light was easy using the new PF-block availabe free from HiTechnic. I wanted to create the way the floodlights on the big graders turn on and off - the large flood light take about 2 seconds to become really bright:
The simple loop allows the brightness to gradually be increased to full level in a loop.
Following the comments from the last part, I am going to add some additional links below: If you want more details of interfacing Power Function (PF) hardware to NXT or using IR-Link with PF hardware please check out the following posts I done in the past:
BlueToothKiwi
Tuesday, March 17, 2009
Robots in Education-A view from India
I just came across this interesting video from India on the subject of robots in education: http://www.youtube.com/watch?gl=GB&hl=en-GB&v=cO-McazH9gg
Let's give him (or her) some encouraging--and constructive---feedback.
Let's give him (or her) some encouraging--and constructive---feedback.
Monday, March 16, 2009
NXT 3D Scanner
MCP Philo, well known for a lot of exciting robots, deep insight into the NXT internal electronics and as author of many LDraw parts and of a NXT book (just to name a few things), has published a new fascinating device: a NXT-based 3D scanner.
It scans small objects using a needle mounted on a LEGO® linear actuator and reports the data to a computer where they can be used to generate a related 3D CAD model:
Intriguing!
Note that the scanner has been programmed with pbLua, the NXT programming language based on Lua.
A lot of more information can be found on the associated web page.
Sunday, March 15, 2009
Robot Sumo with Killer-Dozers
For the last 6 weeks , we had the pleasure of hosting a 13 year old Exchange Student from Hamburgh, Germany. During the last few weeks, he had lots of fun playing with our huge array of MINDSTORMS NXT kits & TECHNIC pieces.
It was his last day yesterday - so we decided to organise a Sumo challenge to mark the occasion between the five of us in the house.
We wanted very rapid rounds, so we chose Philo's KillerDozer design. The cool thing about the Killer dozer is that two KillerDozer can be built in only a few minutes out of the box from a single 8275 Bulldozer kit. You can find out more about it on Philo's web site.
The concept is simple: Each player control a dozer, the purpose of the game is to tip over the opponent. With the RC handset you control your dozer to go straight forward, to turn in place backwards, and to lift/lower the blade to raise your opponent.
We had about a dozen heats - here is one of them with some minor editing:
If you dont have a 8275 kit, and want to make your own NXT robot, checkout the following posts I did in the past on creating your own Sumo ring, NXT sumor robots and tournaments:
Do you know of any additional resources for NXT Sumo? Feel free to post it under Comments:
NXT Switchboard: another remote control for the NXT
These days, I pondered about a way to test new robots already during development phase to figure out reasonable and working usage of the NXT motors, without the need to write (and frequently adapt) a separate program each time.
It occurred to me that (apart from approaches that use PC remote control) it might be a good strategy to create a NXT-based Bluetooth remote control that allows for separate control of each motor independently.
And here it is: the NXT Switchboard.
The program that actually runs on the robot in development (presently implemented in leJOS NXJ, the Java platform for the NXT) is a general-purpose one (it simply receives and handles the control signals sent by the remote control) and can be re-used for each robot.
Of course, one can use the NXT Switchboard also to remotely control finished robots (if required).
Addendum: in the video, the hand wheels are operated by my invisible Chesire Cat ;).
It occurred to me that (apart from approaches that use PC remote control) it might be a good strategy to create a NXT-based Bluetooth remote control that allows for separate control of each motor independently.
And here it is: the NXT Switchboard.
The program that actually runs on the robot in development (presently implemented in leJOS NXJ, the Java platform for the NXT) is a general-purpose one (it simply receives and handles the control signals sent by the remote control) and can be re-used for each robot.
Of course, one can use the NXT Switchboard also to remotely control finished robots (if required).
Addendum: in the video, the hand wheels are operated by my invisible Chesire Cat ;).
Saturday, March 14, 2009
Extras with black NXT

The Black NXT, comes with some nice extra downloads.
4 different walpapers, instructions for some special Black models, build by the MCP.
This Brickshelf link shows more.
Martyn
Thursday, March 12, 2009
Jay Kinzie's Lego Digital Designer Building Tips
Hello Community,
I wanted to share some tips that I have found in my experience with Lego Digital Designer(LDD):
I build in a sequence that LDD will work with. I have noticed that LDD does not build in true regular LEGO units. Instead, when you place a piece, it is placed very close to a true unit. Over time, these slight variations will add up to a point where you will not be able to align parts properly. This could be observed as not being able to put a peg in a beam, or not being able to place an axle. The rotation feature will make the most error because it is continuous. This makes it very hard to align parts by using rotation because it is hard to see how far a part should be rotated exactly by eye. However, there are some work-arounds for this problem. One useful building schemes that I have found is to build from the outside in. If you are having problems setting something towards the outside of your model, build temporary scaffolding around what you intend to build. This helps to set the error at that particular build stage. Depending on the complexity of the model, this may work, but it is possible that it may just give you the same problem but in reverse towards the middle of the robot. Altering where you start building your model will have an effect on how and where the error accumulates. Another Way to build complex models in LDD is to build them in modules and then connect the modules together. Starting from scratch for each module prevents the error from accumulating to an unworkable level. Cut and paste works in LDD. If you have a file open containing a module, select it all, use the copy command, open the main file, and paste in the module to be placed.
- Jay “click-click” Kinzie
I wanted to share some tips that I have found in my experience with Lego Digital Designer(LDD):
I build in a sequence that LDD will work with. I have noticed that LDD does not build in true regular LEGO units. Instead, when you place a piece, it is placed very close to a true unit. Over time, these slight variations will add up to a point where you will not be able to align parts properly. This could be observed as not being able to put a peg in a beam, or not being able to place an axle. The rotation feature will make the most error because it is continuous. This makes it very hard to align parts by using rotation because it is hard to see how far a part should be rotated exactly by eye. However, there are some work-arounds for this problem. One useful building schemes that I have found is to build from the outside in. If you are having problems setting something towards the outside of your model, build temporary scaffolding around what you intend to build. This helps to set the error at that particular build stage. Depending on the complexity of the model, this may work, but it is possible that it may just give you the same problem but in reverse towards the middle of the robot. Altering where you start building your model will have an effect on how and where the error accumulates. Another Way to build complex models in LDD is to build them in modules and then connect the modules together. Starting from scratch for each module prevents the error from accumulating to an unworkable level. Cut and paste works in LDD. If you have a file open containing a module, select it all, use the copy command, open the main file, and paste in the module to be placed.
- Jay “click-click” Kinzie
Wednesday, March 11, 2009
NXT Motor Grader: Part 2: Steering and wheel lean
Yesterday I started a new series of posts on creating a NXT motor Grader. In part 2 today I like to continue where I left off: designing the steering and wheel lean.
video:
[And please remember to press the new HQ button on the YouTube video to watch the video in high definition.]
The Design process:
My second attempt used some of the new components that shipped with some of the new 2009 TECHNIC models - namely the wheel braces. However, I removed the front wheel drive motors as it impacted the steering accuracy. And talking of accuracy - I replaced the PF motors + clutch with NXT servo motor (with built in rotation sensors) - so I have fine control over the lean of the two wheels:

The finished design worked beautifully achieving 45 degrees lean either way. The leaning had an impact on the turning circle - making it smaller (see video above):
BlueToothKiwi
The wheel lean is an important feature of the motor grader that sets it apart from other construction vehicles:
Unlike some vehicle that uses wheel-lean to steer the vehicle (e.g. the Dodge Tomahawk), the wheel lean is used to aid the operator achieve a perfect grading finish: when the blade is at an angle, it helps keeping the grader pulling in a straight line. The top of the front wheels are normally leaned in the direction that material comes off the moldboard. You can find out more from this site [Thanks to John Brost for the link].

Unlike some vehicle that uses wheel-lean to steer the vehicle (e.g. the Dodge Tomahawk), the wheel lean is used to aid the operator achieve a perfect grading finish: when the blade is at an angle, it helps keeping the grader pulling in a straight line. The top of the front wheels are normally leaned in the direction that material comes off the moldboard. You can find out more from this site [Thanks to John Brost for the link].
video:
[And please remember to press the new HQ button on the YouTube video to watch the video in high definition.]
The Design process:
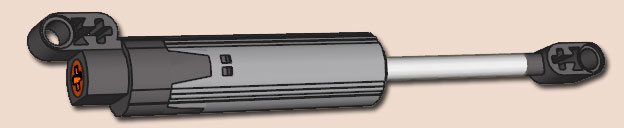
My first attempt at creating the wheel lean used two PF motors and linear actuators and a single NXT servo motor in the middle for steering:
The PF motors were powered by a separate PF supply and contolled from the NXT by an IR-Link. An array of 4 IR receivers were placed infront of the IR-Link which commanded the motors based on the signal sent by the IR-Link for each of the four channels. The IR-Link and the remote receivers were then covered to stop the interfereence from sun light.
Two additional PF motors provided power to the two front wheels. With the new PF block for the IR-Lik, one can vary the power between left and right during steering - giving excellent control over the turning circle.
And although it looked elegant, I had got the pivot point wrong - so instead of leaning just the wheel it raised and lowered the vehicle instead! (see video above). I also made the wheels powered - just like the top of the range graders. However, the powered front wheels made accurate steering very hard.
My second attempt used some of the new components that shipped with some of the new 2009 TECHNIC models - namely the wheel braces. However, I removed the front wheel drive motors as it impacted the steering accuracy. And talking of accuracy - I replaced the PF motors + clutch with NXT servo motor (with built in rotation sensors) - so I have fine control over the lean of the two wheels:

The finished design worked beautifully achieving 45 degrees lean either way. The leaning had an impact on the turning circle - making it smaller (see video above):
BlueToothKiwi
NXT Motor Grader: Part 1: Design
In the coming weeks, I will be making a motor grader based on a MINDSTORMS NXT kit and easilly available LEGO TECHNIC pieces. This is the first part of a five part series - and I will be updating everyone as the model takes shape over the next few weeks.

Today we are going to look at the actual Motor Grader, and see how best to robotize it. This will involve making some compromises as we balance great looks (faithful to the actual vehicle) against NXT functionality and constraints imposed by the TECHNIC pieces.

A new Motor Grader like the caterpillar M series (with joystick control) pictured above are extremely advanced and cost up to half a million dollars with all the attachments and add-on's. The add-ons such as AccuGrade (grade laser that takes away the need for survey stakes you see on road constructions sites) and other electronic kits (GPS, ATS, Cross Slope and Sonic kits) enable the vehicle operator reach perfect grade finish with least number of passes. Motor Graders are also probably the most complex of the construction machines to robotize.

Today we are going to look at the actual Motor Grader, and see how best to robotize it. This will involve making some compromises as we balance great looks (faithful to the actual vehicle) against NXT functionality and constraints imposed by the TECHNIC pieces.
A new Motor Grader like the caterpillar M series (with joystick control) pictured above are extremely advanced and cost up to half a million dollars with all the attachments and add-on's. The add-ons such as AccuGrade (grade laser that takes away the need for survey stakes you see on road constructions sites) and other electronic kits (GPS, ATS, Cross Slope and Sonic kits) enable the vehicle operator reach perfect grade finish with least number of passes. Motor Graders are also probably the most complex of the construction machines to robotize.
A Motor grader consist of two steerable front wheels (usually powered) and a circle and moldboard (blade) in the middle. A complex arrays of hydraulics controls the blade, the 3D steering and other moving parts.
My initial design plan is to use a mixture of NXT and PF motors and an array of linear actuators ( instead of the hydraulics used in the real thing). A few sensors and NXT-G programs will give the robot some autonomy. So to summarise:
- 5 motors / 4 linear actuators for the front wheels (providing power, active suspension and 3-d steering)
- 5 motors / 4 linear actuators in the middle to control the moldboard (providing four degrees of movement for the blade)
- 1 motor to control the articulations between the front and the back
- 2 motors / 1 linear acutator to control the rear attachment
- 4 motors for the rear dfferential drive control / wheels
- 2 PF battery packs and 2 NXT bricks.
- 1 IR-Link sensor
With the large amount of electronics and batterypacks you have to address the weight problem. This is a challenge in itself. It looks a bit ambitious - but we will see how it goes in the next few days as the robot start taking shape.
I also want to restrict the extra parts to parts from the currently shipping 2009 TECHNIC models - so that readers can get hold of the parts easilly. This also gives me a chance to play with some new parts introduced with the spring catalog models in the last few months including the ones below I was playing with over the weekend:
The next part will be here tommotow - and it will be on design of the steering control - which is what I am working on right now.
Comments and suggestions are always welcome.
Earth Explorer AlphaRex visits Antarctica!

You read the title correct. He's in Antarctica this time... Waaay down under at Davis Station! See the sites and read the news of his visit on LEGO MINDSTORMS' homepage. There's a bunch of interesting information about Davis Station out on the web. Maybe some of the particulars about this visit will be added in the comments.
Chris
Article on geekdad on NXT 2.0
RobotChallenge 2009 in Vienna

In ten days, on 21st of March, the RobotChallenge 2009 will take place in Vienna (Austria). According to the organizers it is the "biggest competition in Austria for self-made, autonomous, and mobile robots":
"The RobotChallenge offers suitable contests for beginners as well as for experienced robot designer. In addition to the possibility of exchanging ideas and innovations within an international group of participants there is also an excited audience as reward for the months of work in the area of informatics, electronics, mechanics and artificial intelligence."
There will be several interesting contests, including robot sumo, slalom and sprint competitons for humanoid robots.
Vienna is always worth a visit, and with this event, even more.
Tuesday, March 10, 2009
Odin Scout
An amazing build with a unique method of changing direction. The action begins 90 seconds into the video.
NASA Robotics Curriculm Resources

NASA have collated a enormous collection of Robotics activities to use in the classroom. Activities are designed for a variety of different age groups and abilities.
It looks like it has not been updated for a few years, and the majority of activities are designed for use with the older RCX, but there is no reason you couldn't modify them to suit the NXT.
If you're a teacher, have a look through a few (there are 300) and let us know in the comments which one is your favourite.
My favourite is "Junkyard Wars: Mechanical Monsters" Date Posted: 12.27.04
http://robotics.nasa.gov/rcc/general.php?ID=1218
--
Damien Kee
www.domabotics.com
Fana'Briques 2009

If you are living in Europe (or are going to visit it), mark end of June red in your calender: on 27th and 28th of June, Fana'Briques will take place again in Rosheim in the Alsace (France). It's one of the biggest LEGO® events in Central Europe; this year, it will be centered around the topic "LEGO® basketball".
Everyone who has been there already (including me), will certainly come back.
Who hasn't so far: it's absolutely worthwhile - nice athmosphere, tremendeous surroundings, interesting people, heaps of fascinating LEGO® stuff.
By the way: for exhibitors, registration is open now.
Monday, March 9, 2009
What Am I making?

Does anyone want to guess what I am making here with three NXT motors?
BleToothKiwi
Sunday, March 8, 2009
AlphaRex's RoadTrip to Bratislava, Slovakia
AlphaRex's liked the boat on the river Danube to Bratislava, Slovakia.

Find out about his visit and view the picture album here.
Martyn

Find out about his visit and view the picture album here.
Martyn
Saturday, March 7, 2009
Reaction Tester


Did you ever want to know how fast your reflexes were?
This little device can measure how quickly you can react to a 'beep'.
Here's how it works:
- Turn on the NXT and press the button
- A random length of time (1-5 seconds) elapses and then a short 'beep' is played
- You need to clap your hands as soon as you hear the beep
- The time between when the 'beep' is played and when the clap is heard is recorded
- This time is then converted into an angle (0 seconds = 0 degrees, 0.9 seconds = 180 degrees)
- This angle is sent to the motor, which pauses for 2 seconds before returning back to the start.
- If you take too long (more than 0.9 seconds, the device makes an error sound and no time is displayed)
--
Damien Kee
www.domabotics.com
Robot Lab Book
Okay, so I've never actually seen anyone keep a Robot Lab Book, but this link will take you to a checklist that describes how and what goes into a Lab Book (Chemistry). With some slight modifications, this list could easily describe for a robot club, FLL team, or other organization a way to help kids organize their experiments with the NXT kit.
I remember keeping Chemistry and Physics lab books in college, and the rules were fairly strict and part of our grade was based on a review of our book(s) at the end of semesters. No pencil, of course - everything was in ink. A torn out page could get you an automatic letter grade loss, no kidding.
Still, it's an interesting article and maybe someone can come up with a version of the checklist for teachers/coaches.
I remember keeping Chemistry and Physics lab books in college, and the rules were fairly strict and part of our grade was based on a review of our book(s) at the end of semesters. No pencil, of course - everything was in ink. A torn out page could get you an automatic letter grade loss, no kidding.
Still, it's an interesting article and maybe someone can come up with a version of the checklist for teachers/coaches.
Simulation Software for NXT
Check out SimplySim, a French company specializing in 3D simulation. They've got an interesting video that can be viewed at http://www.simplysim.net/
FTC Dutch Final Live, online

Ever wanted to see a First Tech Challenge Final?
Now, here is your change, today there will be a live broadcast, from Den Haag, the Netherlands.
Today, you could have seen between 10:30 and 17:00 (CET), at this link: FTC-Nederland live
You can also visit the final, the entrance is free.
Winning team "Dinges" with their robot.


More information (FTC Dutch)
More information (FTC English translated via google)
Martyn
Thursday, March 5, 2009
Random Thoughts
A few months ago I caught a rerun of an old Star Trek: TNG episode (sorry, I don't have the ep. name) - it opened with a child, maybe 6 or 7 years old complaining to his parents that he didn't like Calculus or something like that. It reminded me of a book I hadn't read in a while, so I dug out my old copy of Neal Stephenson's "Diamond Age" - in it, a young girl finds a "book" that is interactive - it speaks to her and shows her pictures. The young girl uses it to first learn the alphabet and how to spell... it tells her stories, and if she doesn't recognize a word or concept in the story, the book goes off on a tangent and teaches her new content until it can return to the original story. Fiction, of course, but who wouldn't want their child to have a book that moved at the child's speed and would provide content at an increasing rate based on the child's interest?
This got me thinking recently about our LEGO NXT kits... and about the new WeDo kits. Given availability, many kids are now able to start tinkering with robotics at an even younger age. LEGO has provided a kit that will allow a teacher or parent to gauge a child's interest in computers or robots or programming. My son already can't keep his hands off my laptop keyboard and has figured out that dragging his fingers on the touchpad moves the mouse pointer on screen. He's not even 2 yet.
There are other subjects that I believe kids should be introduced to - art, music, history, and more. And each of these subjects probably have their own methods for introducing and encouraging kids to learn more. But we're talking about technology here - specifically, robots. So it makes me wonder how I can use my computer and robot kits to make learning more fun and more supportive when he needs extra help.
It's coming - I can see the day when a child has their own personal robot that imprints on them... follows them, maybe... and is always challenging them with questions and providing some answers. With the development of advanced WiFi technologies, the day is near when Internet connectivity with all devices will be "always on" so access to Wikis and other sites that can provide questions and answers will be a nanosecond away from a robot going out and grabbing a response to a child's query. Text-to-Voice (and vice-versa) conversion is here, but not great, but there will be breakthroughs in that area as well as voice detection and parsing of statements and questions.
Personal robots have a long way to go, but the technology is also moving so fast. I believe we're going to be shocked at the development or robots over the next 10 years. My first computer, the very first Apple Macintosh, had a floppy drive, no hard drive, b&w screen, and a single-button mouse. That was in 1984. Now, 25 years later, my laptop is more powerful than 500 of those Macs put together - and remember, 1984 was pre-Internet. The Dark Ages of computers is over... (can be argued, of course)... now we're going to start seeing robots being developed for all kinds of roles and not just as toys and heavy manufacturing solutions. They're primed and ready to start filling in the other areas of our daily lives - commuting, cooking, cleaning, etc.
It will be interesting to see what the LEGO MINDSTORMS 2020 version looks like. It's only 11 years away, but with all the breakthroughs that are occuring, I'm certain that a RIS owner from 1998 wouldn't recognize it if they had a glimpse. Maybe the next wave of robotics kits (LEGO and non-LEGO) will be for kids to build their own personal learning companion and tweak its outer design to their own style - the operating system and software will "wake up" and the robot will begin to teach its new friend as it begins to learn, too.
This got me thinking recently about our LEGO NXT kits... and about the new WeDo kits. Given availability, many kids are now able to start tinkering with robotics at an even younger age. LEGO has provided a kit that will allow a teacher or parent to gauge a child's interest in computers or robots or programming. My son already can't keep his hands off my laptop keyboard and has figured out that dragging his fingers on the touchpad moves the mouse pointer on screen. He's not even 2 yet.
There are other subjects that I believe kids should be introduced to - art, music, history, and more. And each of these subjects probably have their own methods for introducing and encouraging kids to learn more. But we're talking about technology here - specifically, robots. So it makes me wonder how I can use my computer and robot kits to make learning more fun and more supportive when he needs extra help.
It's coming - I can see the day when a child has their own personal robot that imprints on them... follows them, maybe... and is always challenging them with questions and providing some answers. With the development of advanced WiFi technologies, the day is near when Internet connectivity with all devices will be "always on" so access to Wikis and other sites that can provide questions and answers will be a nanosecond away from a robot going out and grabbing a response to a child's query. Text-to-Voice (and vice-versa) conversion is here, but not great, but there will be breakthroughs in that area as well as voice detection and parsing of statements and questions.
Personal robots have a long way to go, but the technology is also moving so fast. I believe we're going to be shocked at the development or robots over the next 10 years. My first computer, the very first Apple Macintosh, had a floppy drive, no hard drive, b&w screen, and a single-button mouse. That was in 1984. Now, 25 years later, my laptop is more powerful than 500 of those Macs put together - and remember, 1984 was pre-Internet. The Dark Ages of computers is over... (can be argued, of course)... now we're going to start seeing robots being developed for all kinds of roles and not just as toys and heavy manufacturing solutions. They're primed and ready to start filling in the other areas of our daily lives - commuting, cooking, cleaning, etc.
It will be interesting to see what the LEGO MINDSTORMS 2020 version looks like. It's only 11 years away, but with all the breakthroughs that are occuring, I'm certain that a RIS owner from 1998 wouldn't recognize it if they had a glimpse. Maybe the next wave of robotics kits (LEGO and non-LEGO) will be for kids to build their own personal learning companion and tweak its outer design to their own style - the operating system and software will "wake up" and the robot will begin to teach its new friend as it begins to learn, too.
Tuesday, March 3, 2009
IAR Releases NXT Firmware Compiler
IAR has released a free LEGO MINDSTORMS NXT version of their compiler, which is what LEGO used to build the NXT firmware. With this release, it will be relatively simple to work with the firmware.
Press Release
And
Download
Thanks to John Hansen from NXTasy for pointing this out.
Richard
Press Release
And
Download
Thanks to John Hansen from NXTasy for pointing this out.
Richard
NXT Claw Striker

After I insulted my NXT for being physically inferior to my cat in just about every way, it sulked back down to my den and contemplated its next move. Hey, what if it stole a play from the cat's book, and tried striking quickly with a claw?
This Claw Striker robot uses the ultrasonic sensor to turn around and locate a target, move to the proper range (forwards or backwards as necessary), then strike quickly with it's claw-tipped whip-like arm.
Here's a video. No, it's not brave enough to take on the cat yet, even if I would let it (please don't try with yours either).
FLL and The Wizard of Oz - conspiracy revealed!
Maureen emailed me to let me know that her FLL team may have found a connection between this year's Climate Connections puzzle and the movie "The Wizard of Oz" and they made a video to show at their regional finals - check it out by visiting Maureen's blog at http://legoteacher.blogspot.com/
Monday, March 2, 2009

{kind=link}
AlphaRex's RoadTrip to Tallinn, Estonia.
AlphaRex keeps on traveling, this time to Tallinn, the capital of Estonia.

Find out about his visit and view the picture album here.
Martyn

Find out about his visit and view the picture album here.
Martyn
Sudoku Solver
As someone who loves to do Sudoku at the highest difficulty level, I can appreciate this little project...
Thanks, VvR, for the link.
Thanks, VvR, for the link.
Subscribe to:
Comments (Atom)